Hardware · Shipped 2024
3D Scanner
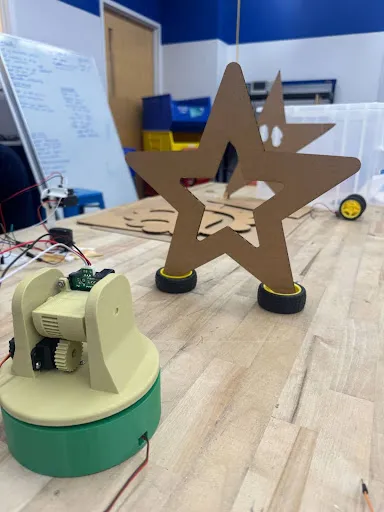
An Arduino-driven pan-tilt scanner that sweeps an IR sensor across an object and reconstructs its shape in MATLAB — calibrated optics, clean serial pipeline, real results.
- Year
- 2024
- Role
- Team of 2 (with Liam Carlin)
- Stack
- Arduino, C++, MATLAB, 3D Printing, IR Sensors
Overview
We built a 3D scanner from an IR distance sensor and two servos arranged as a pan-tilt rig. An Arduino Uno collects distance measurements across two axes and streams them to MATLAB, which reconstructs the object as a 2D depth map. The project ties together mechanical design, electronics, and a data pipeline into one working instrument.
How it works
The rig sweeps the sensor vertically (0–90°) while logging distance, then rotates
one degree horizontally and repeats — building a grid of depth values that
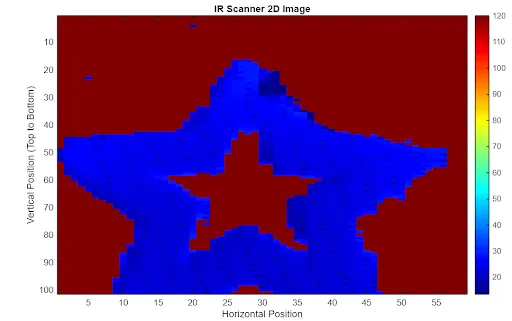
MATLAB renders with imagesc().
The challenge
Three things had to be right at once: a mechanically stable rig that didn’t wobble, electrical connections that survived continuous servo motion, and an IR sensor calibrated accurately across its range.
Approach
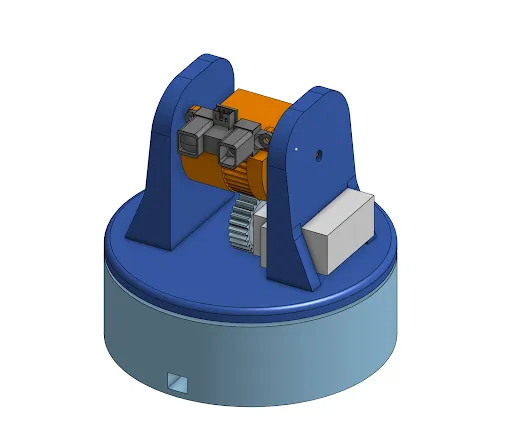
- Mechanical — a 3D-printed, low-center-of-gravity apparatus using a rack-and-pinion for smooth, controlled tilt.
- Calibration — we fit a voltage-to-distance curve in MATLAB and derived
d = 49.3511 / (V − 0.2317), then validated it against held-out points and thresholded out unreliable readings beyond 40 cm. - Pipeline — Arduino formats readings as CSV for clean hand-off to MATLAB, with a 150 ms settle delay tuned to balance speed against data quality.
Outcome
Scanning a star-shaped test object produced a clear reconstruction — correct scale, recognizable geometry, even the gap in the center — with only minor angular distortion. Full methodology, schematics, and error analysis are in the project report.
What I learned
Calibration is everything: the difference between a noisy toy and a usable instrument was the curve fit and the thresholding around it. I’d next improve cable management to prevent mid-scan disconnects and write CSV directly to file instead of scraping the serial monitor.